La transmission
|
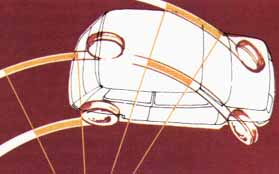
Schéma démontrant la différence de la vitesse angulaire entre les deux roues arrières. Ici, la roue extérieure roulera beaucoup plus vite. |
|
Figure 1 |
3.2
- Rotation autour du point P
Si
on soulève les roues motrices et que l'on fait tourner une roue dans un
sens, l'autre tournera dans le sens opposé en conséquence de l'inversion
du mouvement provoquée par les satellites. Ceci correspondrait à une
rotation autour du point P situé en son milieu (Figure 2).
|
Figure 2 |
3.3
- Rotation autour du point Q
Si
on bloque une roue, le porte-satellites et les satellites tournent en
transmettant tout le couple du moteur à l'autre demi-essieu qui tourne
ainsi à une vitesse double. La roue concernée tournera à une vitesse
deux fois supérieure à ce qu’elle serait en ligne droite (Figure 3).
|
Figure 3 |
Sous
sa forme la plus répandue, le différentiel se compose 1- De deux
pignons coniques, appelés planétaires, reliés aux extrémités des
demi-arbres, généralement par des cannelures; 2- De deux autres
pignons coniques, appelés satellites, montés sur un porte-satellites et
engrenant avec les planétaires; et 3- D’une cage supportant le
porte-satellites et solidaire de la couronne du couple conique.
Cas typique de la voiture à moteur avant/propulsion arrière. |
Différentiel pour moteurs transversaux |
3.4
- Principe de fonctionnement
Le
couple C du moteur fait tourner le porte-satellites
autour de l'axe des planétaires, lesquels, soumis chacun à un couple C/2,
transmettent le mouvement aux roues, Dans ce cas, qui correspond à une
trajectoire rectiligne, les satellites ne tournent pas autour de leur axe
mais ont seulement pour fonction de constituer une liaison rigide entre
les planétaires. Si maintenant avec la boîte de vitesses au point mort
et après avoir soulevé les roues motrices on en fait tourner une, on
remarque que l'autre tourne en sens inverse : l'action compensatrice du
différentiel augmente la vitesse d’une roue tout en réduisant celle de
l’autre.
|
Figure 4 |
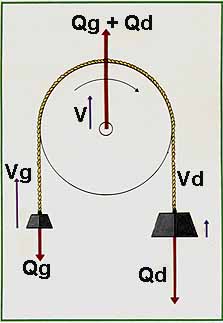
Les
forces Qg et Qd exercées par les planétaires sur le
satellite peuvent être interprétées comme des poids
appliqués aux extrémités d'une corde passant sur une poulie. Si R
est la résistance de frottement qui s'oppose au mouvement de la poulie et
que Qd > Qg la poulie ne tournera que si Qd -
Qg > R. La poulie demeure immobile tant que la différence des
forces appliquées aux extrémités de la corde ne dépasse pas la résistance
de frottement. De la même manière, le satellite ne tournera pas, et par
conséquent les vitesses angulaires des deux roues motrices seront égales,
si la différence entre les forces motrices est plus petite que la force
de frottement interne du différentiel. Quand la différence entre les
forces appliquées dépasse la résistance de frottement, on constate que
la poulie tourne alors de telle sorte que le poids le plus lourd s'abaisse
et le plus léger s'élève avec une vitesse V. Si la
poulie tourne avec une vitesse v inférieure à V,
il en résulte que les vitesses absolues des extrémités de la corde sont
respectivement :
- Vg
plus
grande que celle de la poulie dans le cas de l'extrémité qui monte
(poids appliqué plus faible) ;
- Vd
plus petite que celle de la poulie dans le cas de l'extrémité qui
descend (poids appliqué plus fort).
4
- Le différentiel autobloquant
Le
différentiel autobloquant est un mécanisme qui limite la fonction
primaire du différentiel en empêchant les deux roues motrices d'un véhicule
de tourner à des vitesses très différentes l'une de l'autre. Le différentiel normal répartit d'une façon presque
égale entre les deux roues motrices, le couple développé
par le moteur et cela en ligne droite, pour ainsi
permettre aux roues de tourner à des vitesses différentes en virage.
|
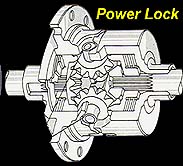
Type de différentiel autobloquant |
Vers
la fin des années vingt, la nécessité d'utiliser un dispositif
susceptible de limiter d'une façon automatique le patinage d'une roue
motrice à la suite d'une panne d'adhérence, s'était déjà fait sentir
sur les véhicules militaires et sur les voitures de sport. Cette exigence a été satisfaite par l'apparition du différentiel
autobloquant. Pour comprendre le fonctionnement de cet appareil, considérons un
différentiel normal. Le couple moteur M est divisé en
deux couples Md et Mg appliqués sur les
arbres de roue, et d'un couple Mf de frottement interne
du différentiel, qui peut être considéré comme négligeable.
Toutefois, ce dernier couple est celui qui permet aux deux roues motrices
de tourner à des vitesses différentes.
En ligne droite,
les deux roues tournent à la même vitesse et il n'y a pas, de ce fait,
de rotation des satellites ; donc Mf est nul, et le
couple moteur se distribue en parties égales sur les deux roues (Md
= Mg).
En courbe, les satellites tournent, car les deux arbres
tournent à des vitesses différentes, et le couple Mf
entre en jeu et s'oppose aux différences de vitesse entre les deux roues.
Le couple agissant sur la roue extérieure est donc plus faible et devient :
Md = 0,5 (M - Mf) alors que celui qui agit sur la roue
intérieure devient
Mg
= 0,5 (M + Mf). La différence entre les couples appliqués
aux roues est toujours égale à Mf.
Dans
le différentiel classique, le couple Mf (dû au
frottement entre satellites, planétaires et carter) est, comme nous
l'avons constaté, très faible. Ainsi, si une roue rencontre une zone
d'adhérence à peu près nulle (une plaque de verglas par exemple),
l'autre roue reçoit un couple beaucoup plus faible (pratiquement nul), égal
à Mg, insuffisant pour faire avancer le véhicule. Dans
la même situation, pour les différentiels autobloquants par contre, le
couple appliqué à la roue devient plus grand. En effet, le frottement
intérieur est augmenté artificiellement en fonction de certaines
conditions de marche, ou bien lorsque la vitesse de rotation d'une roue
s'accélère soudainement. On évalue l'efficacité du mécanisme en
fonction du pourcentage de couple que les deux arbres de roue se
transmettent mutuellement par frottement.
Cette
valeur s (%) est donnée par la formule : [(Md – Mg) / M]
x 100. Plus s est élevé, plus le système est
efficace. Notons à ce sujet, que sur les voitures de tourisme normales,
la valeur de s est comprise entre des limites peu élevées pour éviter
qu'une connexion trop rigide entre les deux roues ne crée des problèmes
de guidage, surtout dans les virages. Pour les voitures de course par
contre, s peut atteindre jusqu'à 80 %. Dans ce cas, en toute
circonstance, les deux roues sont en mesure de transmettre au sol le
couple moteur le plus élevé possible. L'emploi du différentiel
autobloquant est également avantageux à l'accélération pour des véhicules
puissants. En effet, lorsque l'une des roues, sous la poussée du moteur,
perd une partie de son adhérence au sol, il en résulte un patinage de
cette roue qui nuit à l'accélération. Le différentiel autobloquant
limite le patinage et permet de mieux exploiter la puissance du moteur et
d’obtenir ainsi de meilleures accélérations.
|
Diagramme 2 |
La
ligne a représente le cas d'un différentiel sans
frottement interne (Mg= Md), le couple M
est toujours égal à M . En réalité, il existe
toujours de légers frottements et le résultat est la ligne b.
Les différentiels autobloquants peuvent avoir une répartition du couple
correspondant aux lignes c et d. Suivant les modèles ils permettent, de toute façon, de
transmettre à la roue d'adhérence supérieure un couple nettement plus
élevé. La ligne droite e représente le cas d'un essieu
simple (sans différentiel) dans lequel le couple transmis à une roue est
indépendant de l’adhérence au sol de l’autre roue.
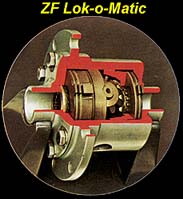
Un
des différentiels autobloquant le plus connu est le ZF Lock o matic.
Il comprend :
-
Le boîtier solidaire de la couronne;
-
Les planétaires emboîtés sur les arbres de roues;
-
Les satellites tournant fou sur les croisillons fixes;
-
Un porte-satellites divisé en deux moitiés avec sièges des croisillons des satellites;
-
Deux embrayages qui agissent entre le carter et les planétaires.
 |
 |
 |
|
| Page précédente | Page d'accueil | Technique | Page suivante |